Fishing For Data
Modeling, Optimal Planning, and Iterative Learning Control for Flexible Link Robots
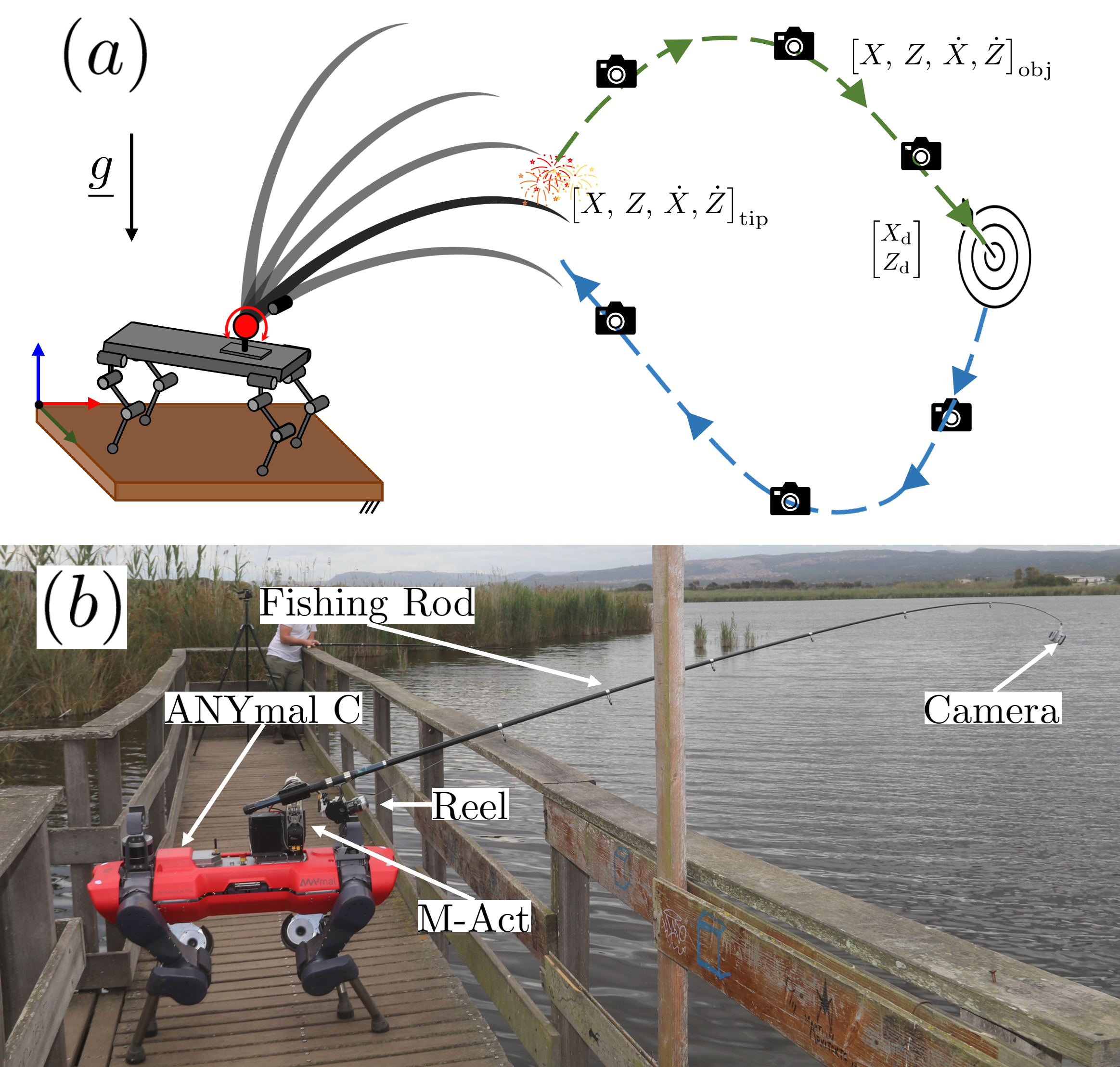
We address the problem of precise motion planning and control of flexible-link robots for throwing small objects. Thanks to lightweight materials and elastic bodies, flexible robots can perform fast motions with few actuators.
However, they need a planning and control strategy capable of exploiting the robot's elasticity, negotiating with the system's underactuation, and compensating for the model's uncertainties.
To solve this challenge, we:
- Compare models for continuum robots' dynamics and, after selecting a lumped-parameters one, we experimentally identify its parameters.
- Plan the robot motion via a Differential-Dynamic-Programming-based strategy tailored for flexible-link robots.
- Employ an Iterative Learning Control approach to close the reality-gap.
Planning Fishing Simulation
Experiments Fishing Throwing
Experiments Camera View
Learning to Throw [Ongoing Work]
I am currently tryin to solve the generalizzation issue of ILC and DDP with RL and to speed up the training with model-based control actions.
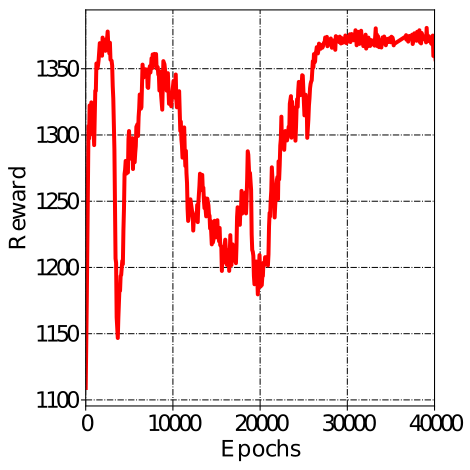
Traning Reward Fishing Throwing
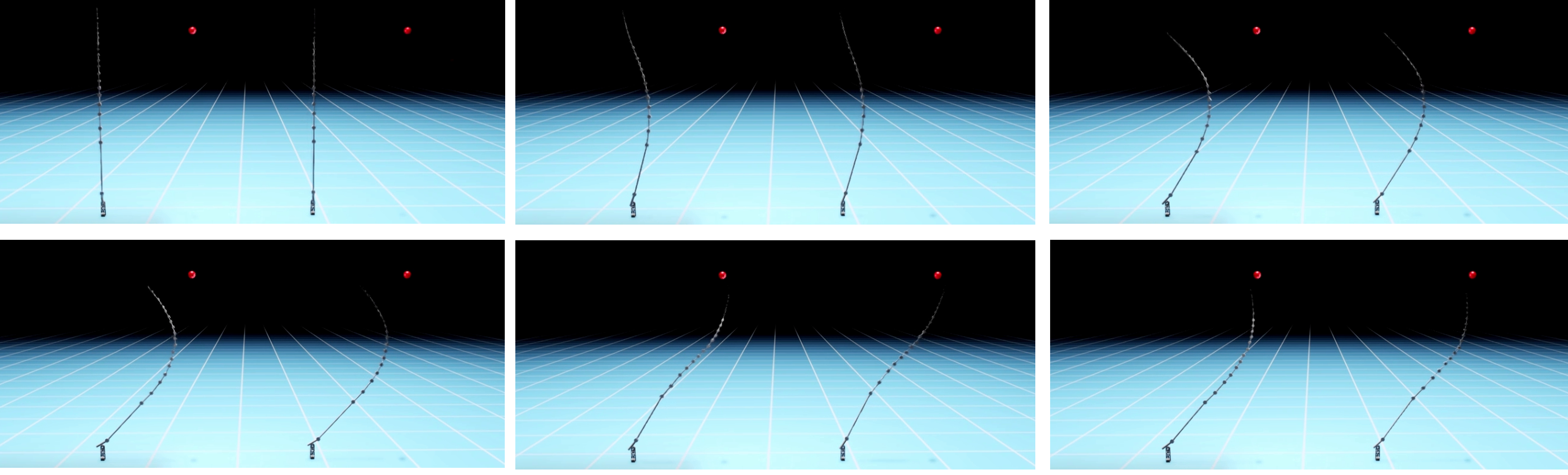
Test Fishing Throwing