Optimal Control
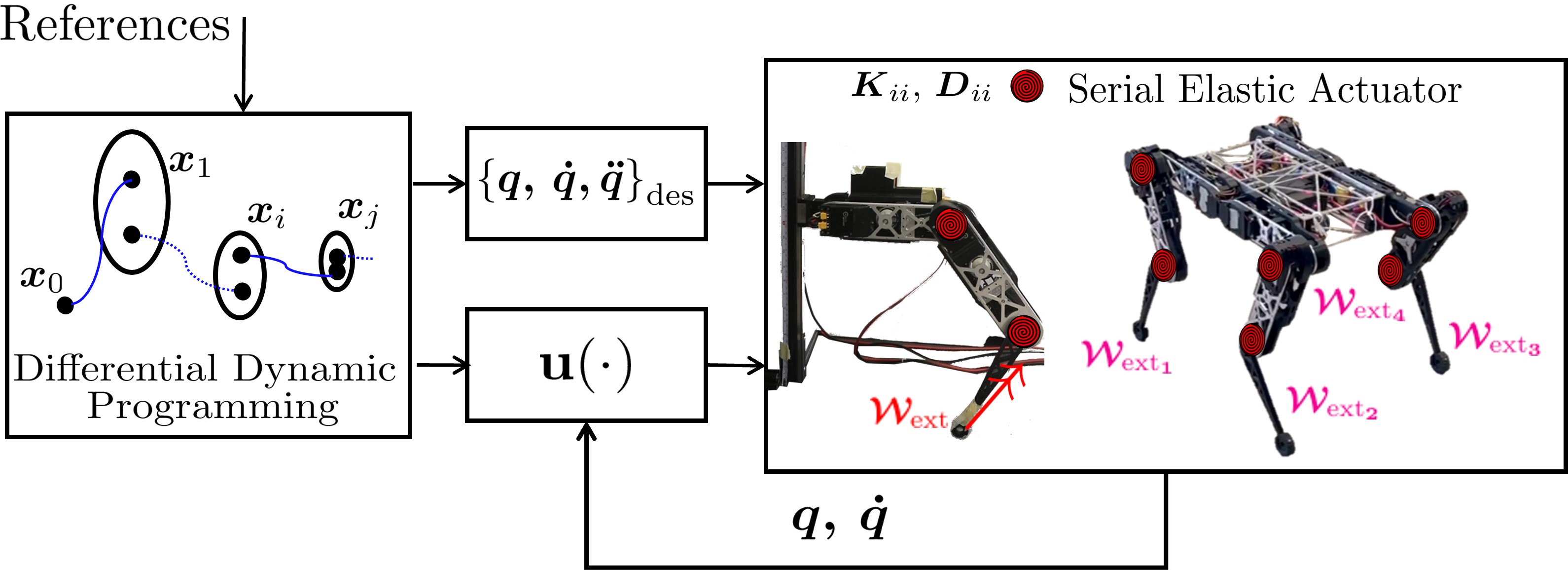
To generate explosive and energy-efficient motions of robots, we implemented a Differential Dynamic Programming(DDP) routine.
DDP works in a model-based paradigm and computes local optimal policy composed a feedback and a feedforward term.
Thus, it is able to exploit the elasitity of the robot's body while ensuring high performances.
We build up from the Crocoddyl library with the following contributions:
- Integration of the Soft Dynamics modeling Serial Elastic and Variable Stiffness Actuators (SEA and VSA).
- Use of Analitical Derivatives.
- Validation on floating-based and fixed-based robots.
We publish the following paper Optimal Control for Soft Articualted Robot (IEEE T-RO). This work focuces on foxed-based robots.
In the following, we report videos of ANYmal B (12 DoFs) jumping via DDP. These examples highlight the importance of the stiffness.
ANYmal B DDP Jumping with \(k_{ii} = 5\) Nm
ANYmal B DDP Jumping with \(k_{ii} = 100\) Nm
Finally, we report videos of Softleg (3 DoFs) and Otto (8 DoFs) robot controller via DDP framework.
Goatfoot DDP Jump \( \approx 40\)cm
Softleg DDP Jump 🏆🎉 \( 95\)cm
Softleg RL Jump \( \approx 70\)cm
Otto Jumping
Otto Walking